Abstract
This article presents the stages of construction of riggings for animation of quadrupeds, from the initial studies to its application in two episodes of an animation series. The objective is to represent the movements of the quadrupeds, within the narrative of the story, to allow the story to advance and entertain the viewer. For this, at first, with the storyboard in hand, the movements and the anatomy of dogs and cats - the animals chosen as animation characters - were studied, from the specialized literature, direct observation of the quadrupeds and analysis of videos recorded by the authors or found on the Internet. To give cartoon-style movement to the characters, research was done on how to apply kinematics to riggings, in scenes with or without interaction between quadrupeds, and on body language in a cartoon-style 3D animation. From this theoretical basis, riggings were built, improved, and applied to the polygonal mesh of each character, for body and facial movements. The result is on YouTube, with the first two episodes of the series. In the methodology, indirect documentation techniques were used, in which a bibliographical and documental research of the objectives is carried out. The method of observation in real life was also used, allowing the understanding of the movement of the quadrupeds and, in addition, videos from the internet and recorded by the authors were observed and interpreted. The text of the article is organized according to the sequence of steps to complete the construction of the rigging of the characters Cleo and Leo from the 3D animation series. In a next step, motion capture in quadrupeds will be tested.
Keywords: Rigging of Quadrupeds, Quadruped Animation; Animation Series; Cartoon Animation; Motion Capture.
Introdução
Este artigo apresenta as etapas de construção de riggings para animação de quadrúpedes, desde os estudos iniciais até sua aplicação em três episódios de uma série de animação. O objetivo é representar os movimentos dos quadrúpedes, dentro da narrativa da história, de forma a permitir que a história avance e entretenha o espectador. O nome rigging em inglês será adotado, pelo costume de uso no mercado profissional, mas poderia ser traduzido para ajustagem ou armação.
O rigging é uma estrutura articulada, que atua sobre a malha de polígonos do personagem tridimensional, dobrando e deformando esta malha, simulando o esqueleto, com suas articulações e ossos. Isto é possível com uma distribuição de pesos desta atuação ao longo dos vértices da malha de polígonos, na etapa conhecida como skinning. Movimentando esta estrutura articulada ao longo do tempo, anima-se o personagem, representado pela malha de polígonos. A animação do rigging pode ser feita manualmente ou aplicando dados de captura de movimento ao personagem quadrúpede (Tannure et al 2022).
Num primeiro momento, com o storyboard em mãos, foram estudados os movimentos e a anatomia de cães e gatos, os animais escolhidos como personagens da animação. Isto foi realizado a partir da literatura especializada, da observação direta dos quadrúpedes e da análise de vídeos gravados pelos autores ou encontrado na internet. Para dar movimento no estilo cartoon aos personagens, pesquisou-se como aplicar a cinemática aos riggings, em cenas com ou sem interação entre quadrúpedes, e sobre a linguagem corporal em uma animação 3D do tipo cartoon. A partir dessa base teórica, riggings foram construídos, aprimorados e aplicados na malha poligonal de cada personagem, para movimentos corporais e faciais. O resultado está no YouTube, com os três primeiros episódios da série. O texto do artigo está organizado de acordo com a sequência de passos para completar a construção do rigging dos personagens Cleo e Leo da série de animação 3D no estilo cartoon. Em uma próxima etapa, será testada a captura de movimento em quadrúpedes.
Este projeto foi pautado pelo princípio de que “seja gerado por computador ou feita a mão, o primeiro objetivo de uma animação é entreter. (…) O animador deve ter em mente duas coisas: um conceito claro do que exatamente vai entreter a audiência; e as ferramentas e habilidades para colocar essas ideias em prática claramente e sem ambiguidade” (Lasseter1987, 43).
Compreendendo que animar o movimento de animais quadrúpedes é um dos grandes desafios na computação gráfica, o animador precisa de um rigging preparado para otimizar esta etapa (Geng e Yu 2003). O estudo aqui apresentado se justifica pelo desafio e oportunidade para compreender as etapas de desenvolvimento de rigging de personagens quadrúpedes, especificamente voltado para uma série de animação 3D.
Neste artigo, os princípios de animação e a construção do rigging, a partir das conclusões do estudo realizado, foram utilizados para animar uma estória da amizade entre um cão, Leo, e um gato, Cleo. A animação foi criada a partir do roteiro original da autora e aluna e de sua colega, Larissa Duarte, como parte do trabalho de conclusão de curso de graduação em Computação Gráfica. Este trabalho resultou em uma série de animação, Cleo e Leo, que tem três episódios finalizados atualmente, acessíveis no YouTube1, cujos links estão na nota final. O aplicativo utilizado para este trabalho foi o software livre Blender (Blender 2023).


Na animação, uma gata da raça Sphynx vivia e se relaxava na varanda do apartamento todos os dias, até que sua Dona adota um filhote de Pug. O cachorro chama-se Leo, um cachorrinho barulhento e agitado. Ele muda toda a rotina de Cleo e divide a atenção de sua Dona. Esses dois personagens vão conviver na varanda. O cachorro Leo quer fazer amizade para brincar e a gata Cleo só deseja ter paz. Os estudos dos personagens estão na figura 1.
O texto a seguir está organizado de acordo com a sequência de passos para completar a construção do rigging dos personagens Cleo e Leo. Em uma próxima etapa, será testada a captura de movimento em quadrúpedes.
Metodologia
Para realizar a pesquisa, foi considerado que não há um método de abordagem que sempre deve ser seguido. O pesquisador deve determinar qual método seguir de acordo com seu propósito de estudo. Com essa premissa, na produção desse projeto foram utilizados alguns métodos de procedimento. O método de procedimento tem a finalidade mais restrita em termos de explicação geral dos dados, com etapas mais concretas de investigação (Marconi e Lakatos 2003, 107).
Assim, foram utilizadas técnicas de documentação indireta, na qual é feita uma pesquisa bibliográfica e documental dos objetivos. Também foi utilizado o método de observação na vida real, possibilitando a compreensão do movimento dos quadrúpedes e, complementando, foram observados e interpretados vídeos da internet.
Movimentação e Anatomia de Animais Quadrúpedes
De acordo com (Bhatti et al 2020), antes de se gerar e entender a locomoção de um quadrúpede, é necessário analisar a estrutura esqueletal de cada animal. Para (Skrba et al 2008), “os esqueletos de animação geralmente são criados em relação a uma malha 3D de destino a ser animada. (…) No entanto, ainda é necessário um bom entendimento da anatomia para poder produzir uma estrutura adequada de esqueleto, especialmente para quadrúpedes”.
Os animais quadrúpedes têm várias maneiras de andar, dependendo de sua velocidade, como demonstrado por (Sung 2013). Para (Thornton 2005, 7), “entender como um animal é construído e como se move é central para criar uma caricatura crível dos movimentos desse animal”.
Para a construção de um rigging estilizado vale ressaltar que “a arte de animar é mais do que fazer uma réplica exata do que vemos na vida real. É uma interpretação artística estilizada de um movimento. (…) Todos os princípios tradicionais de animação se aplicam à locomoção animal para criar uma ilusão de vida” (Thornton 2005, 2).
A técnica de extrair a essência de uma situação e expressar por meio de exagero, tempo e antecipação serve para enfatizar e deixar mais claro os acontecimentos (Lasseter 1987).
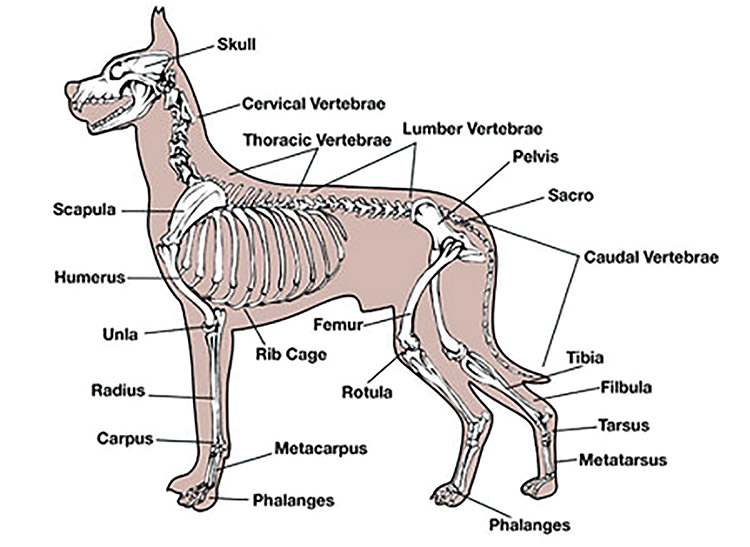
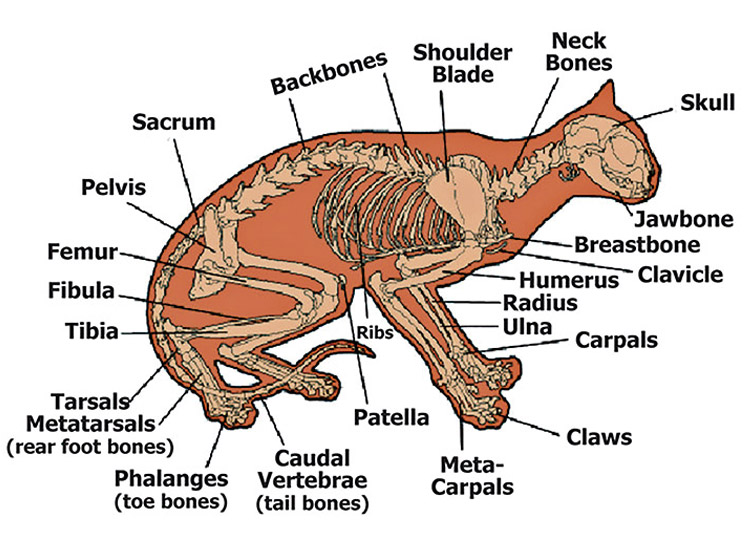
Ao planejar um rigging, que será usado em uma animação 3D, devemos levar em conta que antes de entender a movimentação de um quadrúpede, há uma necessidade de analisar a estrutura esquelética de cada animal (Bhatti et all 2020). A anatomia dos animais de estimação contribui desde a aparência dos animais ao modo como eles se movimentam e interagem com as coisas. “Embora cada cão e gato seja um pouco diferente e tenha algumas variações anatômicas, todos eles têm a mesma estrutura básica” (Bothell Pet Hospital, 2021). Nas figuras 2 e 3 temos os exemplos da estrutura esquelética de um cão e de um gato, respectivamente.
O estudo da locomoção para a criação de um rigging para animação é muito importante para se entender os requisitos e os tipos de movimento que o personagem vai realizar. Assim, o rigging deve ser construído considerando como o personagem deve atuar para demonstrar sua personalidade (Bhatti et all 2015).
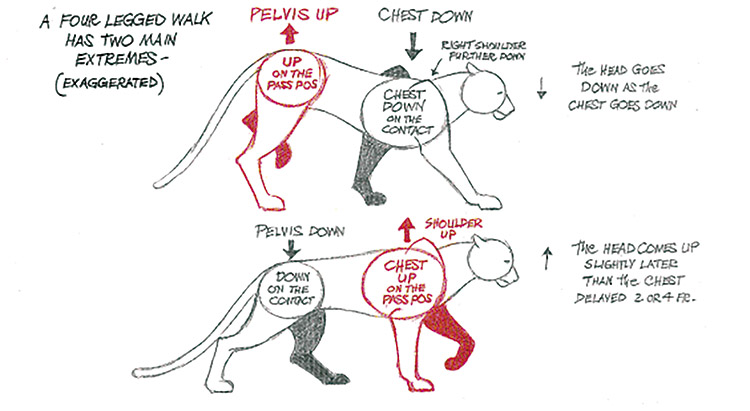
Ao estudar a locomoção dos quadrúpedes, (Williams 2012) destaca que “animais de quatro patas andam como duas pessoas coladas uma na outra - uma ligeiramente antes da outra-; dois pares de pernas levemente fora de sincronia. (…) Mas com dois pares de pernas trabalhando, há um bocado de transferência de peso acontecendo - de onde o peso está vindo, e para onde está indo”. Os extremos do ciclo de caminhada desenhados por William estão na figura 4.
Para um melhor entendimento do movimento de cães e gatos, foram observados vídeos e gifs de referência da internel e foram gravados vídeos pela equipe de desenvolvimento da série animada «Cleo e Leo”, permitindo estudar as posições de contato, distribuição de peso e velocidade, como os quadros da figura 5.

Os vídeos registram os movimentos mais comumente realizados por animais no dia a dia, como o movimento de sentar-se, em que o quadrúpede deve avançar e fazer um movimento ligeiramente para fora com as pernas traseiras e, depois, diminuir a altura desejada do quadril, até que esteja descansando em suas nádegas (Coros et al 2011, 7).
No trabalho de (Thornton 2005), é demonstrado que o trote consiste em uma marcha, onde os membros posterior e diagonal anterior atingem o solo em uníssono, seguido por um ponto de suspensão. Logo em seguida, os membros diagonais opostos atingem o solo, seguido por um segundo ponto de suspensão.
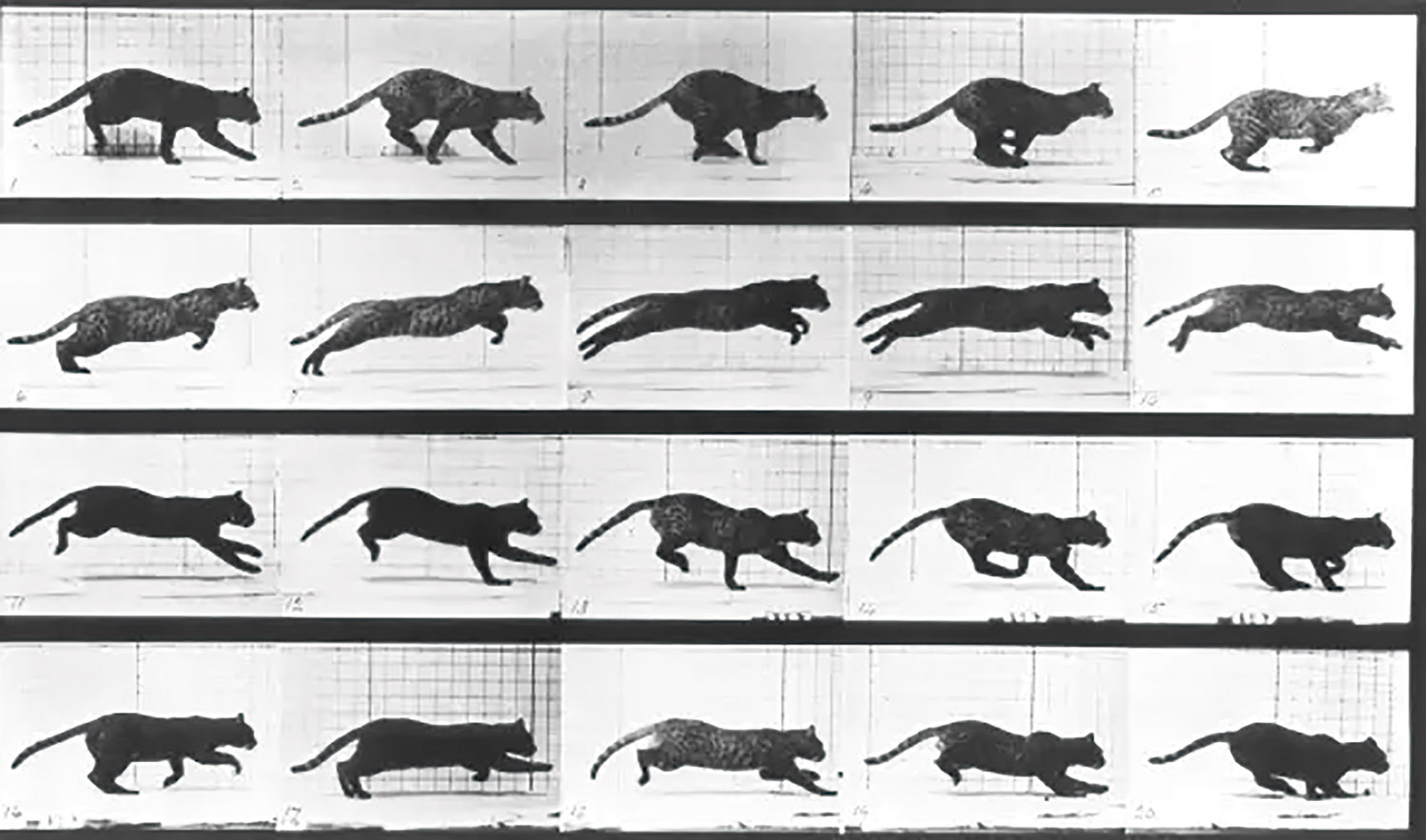
O galope é uma marcha de quatro batidas, em que um membro posterior atinge o solo primeiro, seguido pelo outro membro posterior e, depois, um membro anterior é seguido pelo outro membro anterior e, finalmente, acontece o ponto de suspensão. Diversos exemplos foram encontrados de registros destes movimentos, como no clássico Animais em Movimento, de (Muybridge 1887), que tem uma sequência apresentada na figura 6.
Rigging Estilizado para Personagens Quadrúpedes em Animação do Tipo Cartoon
A animação 3D no estilo desenho animado, ou cartoon, necessita de algumas técnicas aplicadas ao rigging. A animação é do tipo cartoon quando os personagens se movimentam conforme as regras de seu mundo, que podem ser diferentes do mundo real, da forma como estamos habituados. Neste tipo de animação, o personagem pode se esticar ou amassar em um movimento que deforma seu corpo, para expressar movimentos e emoções mais efetivamente, ou realizar qualquer dos movimentos, utilizando os doze princípios da animação.
No livro classico The Illusion of Life (Thomas e Johnston 1995) estão descritos os doze princípios de animação de personagens, que podemos considerar como princípios básicos para a animação de personagens do tipo cartoon em geral. Os doze princípios básicos estão listados a seguir, utilizando algumas observações adicionais de (Liverman 2004).
- Comprimir e esticar: pode ser criado para criar uma sensação de peso.
- Antecipação: é o movimento na direção oposta antes que a ação principal comece.
- Encenação: refere-se a apresentar uma ideia ou ação claramente: como os personagens interagem entre si, como se movem, como a cena é vista.
- Animação direta e posição-chave: são dois métodos de animação. No primeiro caso, a ação é construída em uma sequência de eventos quadro a quadro, começando no início até que a animação esteja completa. Na posição-chave as poses mais importantes da ação são construídas primeiramente. A seguir, os quadros intermediários vão sendo preenchidos até que a animação esteja completa.
- Continuidade e sobreposição da ação: refere-se ao movimento secundário, como passar do ponto de parada e depois retornar, por exemplo; é o oposto da antecipação.
- Aceleração e desaceleração: mudanças na velocidade dos objetos animados.
- Movimento em arco: a maior parte dos movimentos não é linear; refere-se aos objetos se movendo no espaço em arcos ao invés de retas.
- Ação secundária: movimento de outras partes ou objetos que reagem à ação primária dos membros e face, como cabelos e roupas.
- Temporização: refere-se ao ritmo em que a ação ocorre
- Exageração: implica em aproximar ou ultrapassar os limites da realidade física para aumentar ou dramatizar a performance do personagem;
- Personalidade: dois personagens idênticos podem aparecer totalmente diferentes com personalidades diferentes em cada um deles;
- Apelo: a plateia deve achar os personagens interessantes e com apelo, tanto em animação quanto em cenas captadas ao vivo.
“Todos os princípios de um rigging de personagem padrão são incorporados ao rigging, incluindo o aumento do comprimento das partes do corpo, tendo a capacidade de esticar e esmagar o rigging.” (Bhati et al 2014).
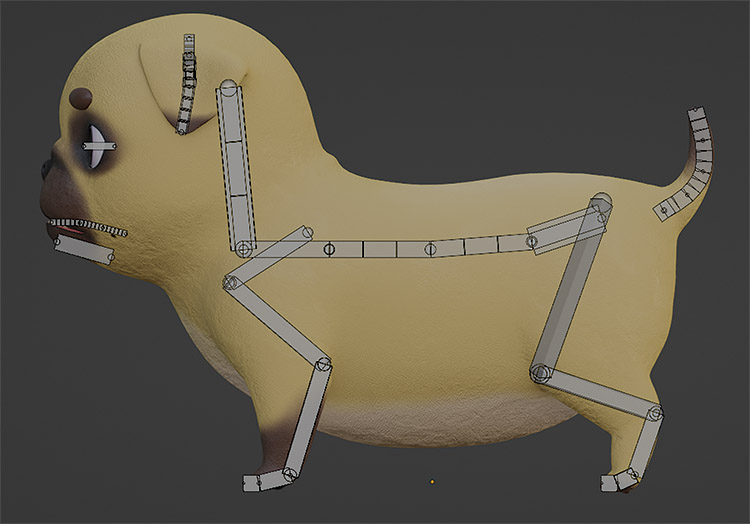
O desenvolvimento de um rigging consiste na criação de uma versão simplificada do esqueleto, representando as articulações do corpo e os ossos a elas conectados (Skrba et al 2008). Assim, são posicionados os ossos de um rigging dentro da malha 3D dos personagens, como na figura 7.
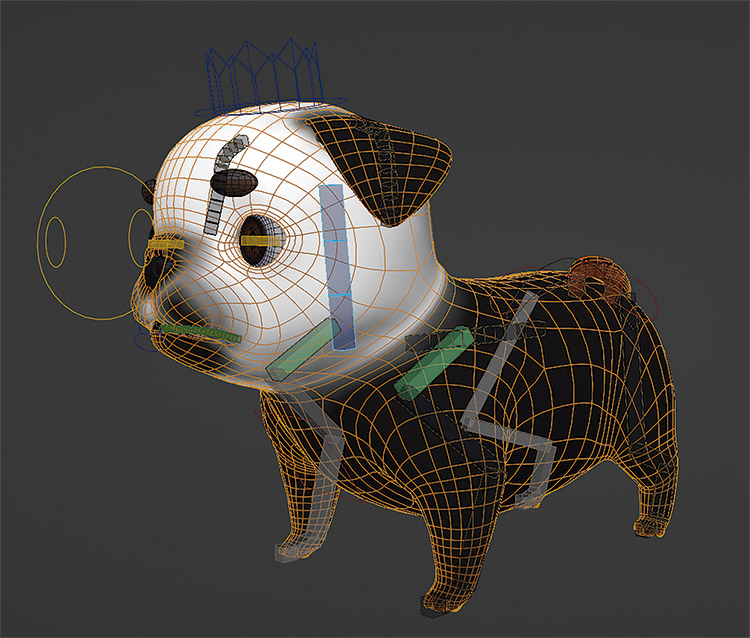
Após o posicionamento dos ossos, é realizado o processo de pintura de peso, no qual é determinado como os ossos afetam a malha de polígonos do objeto 3D, com valores de influência dos ossos para cada vértice da geometria da malha. Na figura 8 se pode observar a pintura de peso para o personagem Leo. Com isso, o movimento da articulação afeta a malha de polígonos do personagem que está conectado ao esqueleto (Arshad et al 2019). É possível, assim, concluir as primeiras etapas de um rigging simples.
Cinemática e Interface Gráfica do Usuário
O próximo passo é adicionar a cinemática direta (forward kinematics, FK) e a cinemática inversa (inverse kinematics, IK) no esqueleto, ou rigging. Citando (Skrba et. al 2008), “a cinemática é o estudo do movimento e permite descrever como uma estrutura esquelética hierárquica se move independentemente das forças do mundo real, que podem ou não ter um impacto efetivo nas marchas de movimento”. Por estrutura esquelética hierárquica, entende-se uma estrutura em que o centro de massa do personagem é a posição mais alta da hierarquia, que vai descendo para as articulações do rigging, na sequência em elas estão posicionadas na estrutura.
A cinemática inversa permite que os ossos mais baixos da hierarquia, como uma mão ou um pé, controlem os superiores, como braços e pernas. Isso facilita colocar uma mão ou um pé exatamente onde precisa estar e fazer com que a hierarquia acompanhe (Allen e Murdock 2008). Um exemplo está na figura 9.

Para descrever a Cinemática Direta, (Arshad et al 2019) considera que FK é um método para manipular o sistema de ossos em hierarquias, do topo para baixo. Nesta técnica, os animadores geralmente precisam animar cada osso individualmente, como na figura 10.

O sistema de IK é mais apropriado para mover braços e pernas, mas quando animamos um personagem caindo ou nadando, o IK produz arcos incorretos para movimentos realistas. Nesses casos o sistema FK é necessário (Bhatti et al 2014).
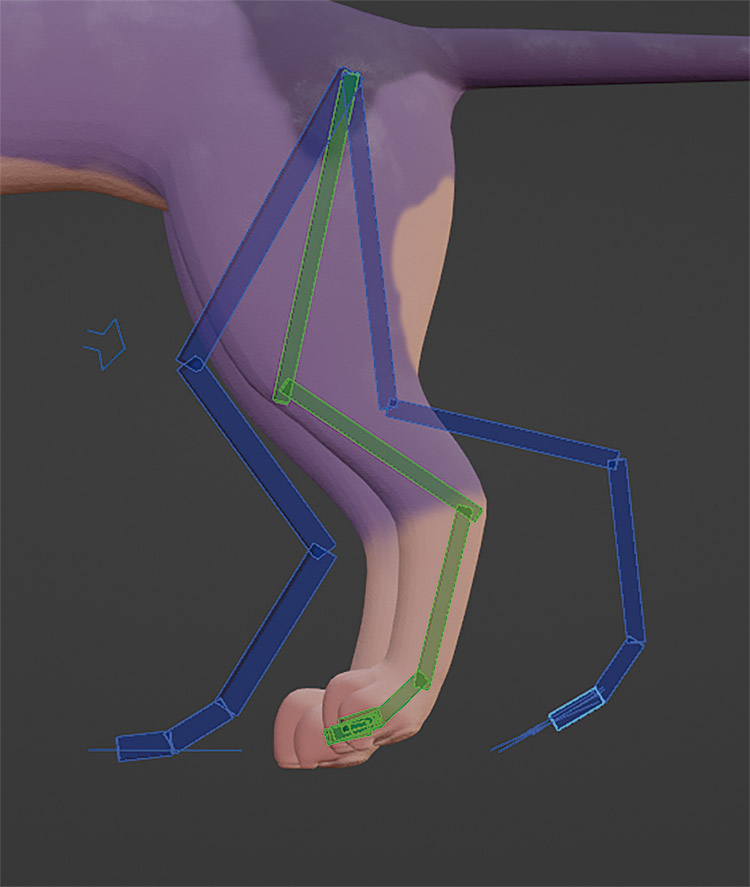
De acordo com (Allen e Murdock 2008), a primeira cadeia de articulações é controlada pelo sistema FK, a segunda cadeia é controlada pelo sistema IK e a terceira cadeia de articulação é vinculada à malha, para deformação”.
No exemplo da figura 11, são representadas as cadeias de ossos, ou articulação, de uma perna da personagem Cleo. Em uma leitura da esquerda para a direita, na figura é mostrada a cadeia da frente como IK, a do meio, presa à malha, para deformação, e a terceira, à direita, de FK.
Para dar prosseguimento ao desenvolvimento do rigging, é fundamental adicionar vínculos (contraints) entre as cadeias de cinemática e a cadeia de deformação, para ser possível fazer a mudança entre as duas cinemáticas. Para ativar os vínculos, um sistema de controles facilita a etapa de animação e especifica qual cinemática será usada (Allen e Murdock 2008).
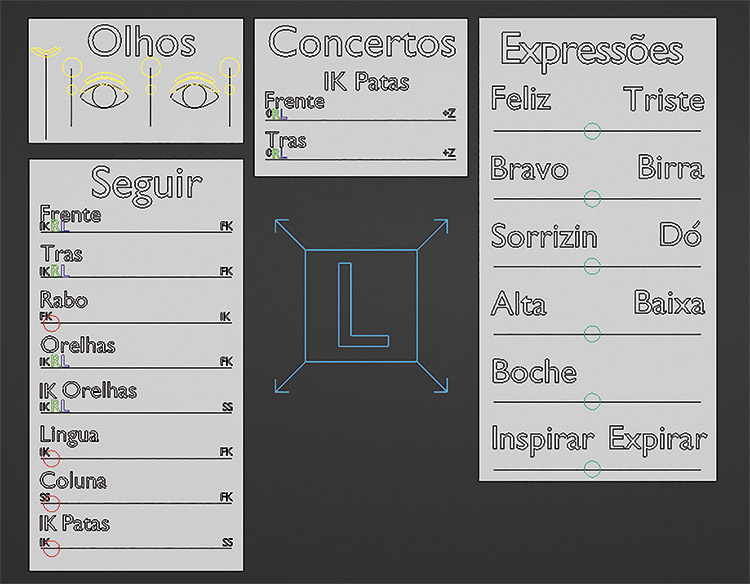
Esse painel de controle é um tipo de Interface Gráfica do Usuário (Graphic User Interface - GUI) e é utilizado para controle de diversas partes do personagem, tais como a troca entre as cinemáticas e a ativação dos doze princípios da animação. Deve-se criar também uma GUI para controlar as expressões faciais (Arshad et al 2019). Na figura12 é apresentada a GUI do personagem Leo.
Resultados: riggings de Cleo e Leo
Com este embasamento teórico, foram criados os riggings para os dois personagens quadrúpedes. Atualmente, o rigging dos personagens está em sua terceira versão. A primeira versão foi utilizada para o primeiro episódio, Juntos pela Chuva. A segunda, para o episódio O Cone, foi composta por implementação de reverse foot. O rigging UI, o layer menagement e o rigging facial foram adicionados ao rigging em sua terceira versão, para o episódio A Torre. Se percebe a diferença entre as animações do primeiro ao terceiro episódio, em grande parte devido à estrutura do rigging, como pode ser comprovado assistindo aos três episódios, que estão nos endereços do YouTube fornecidos na nota final.
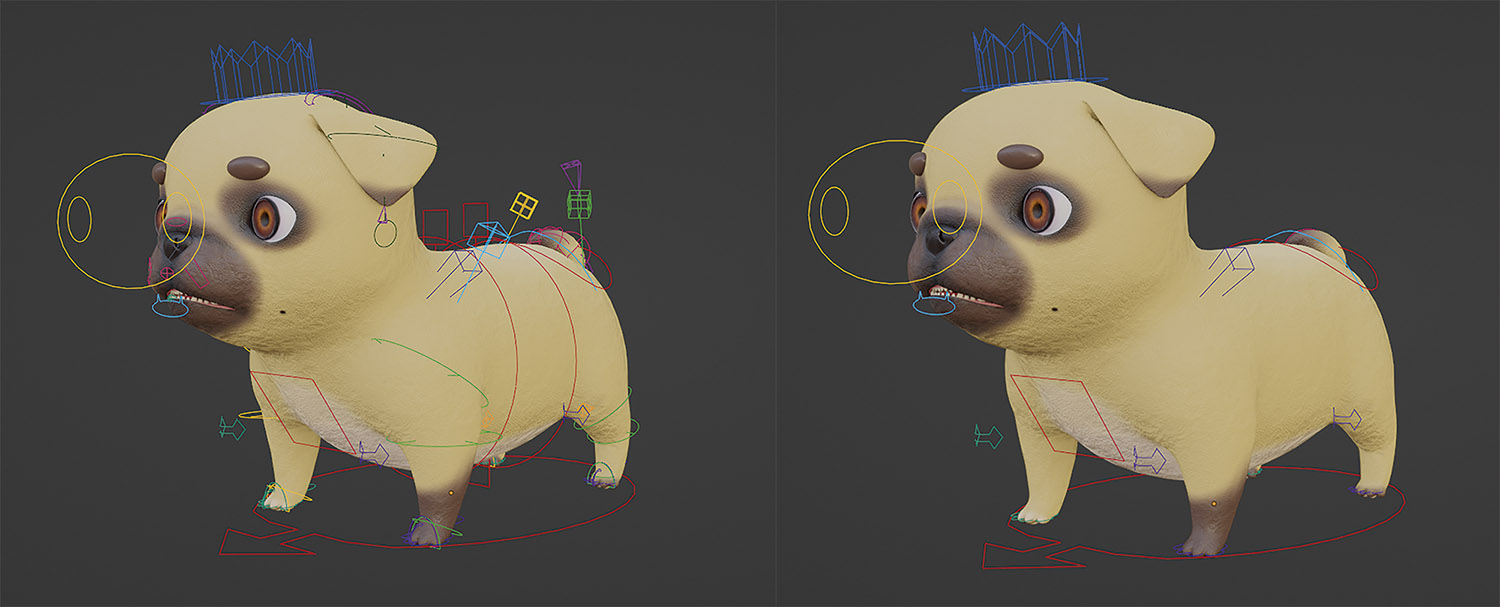
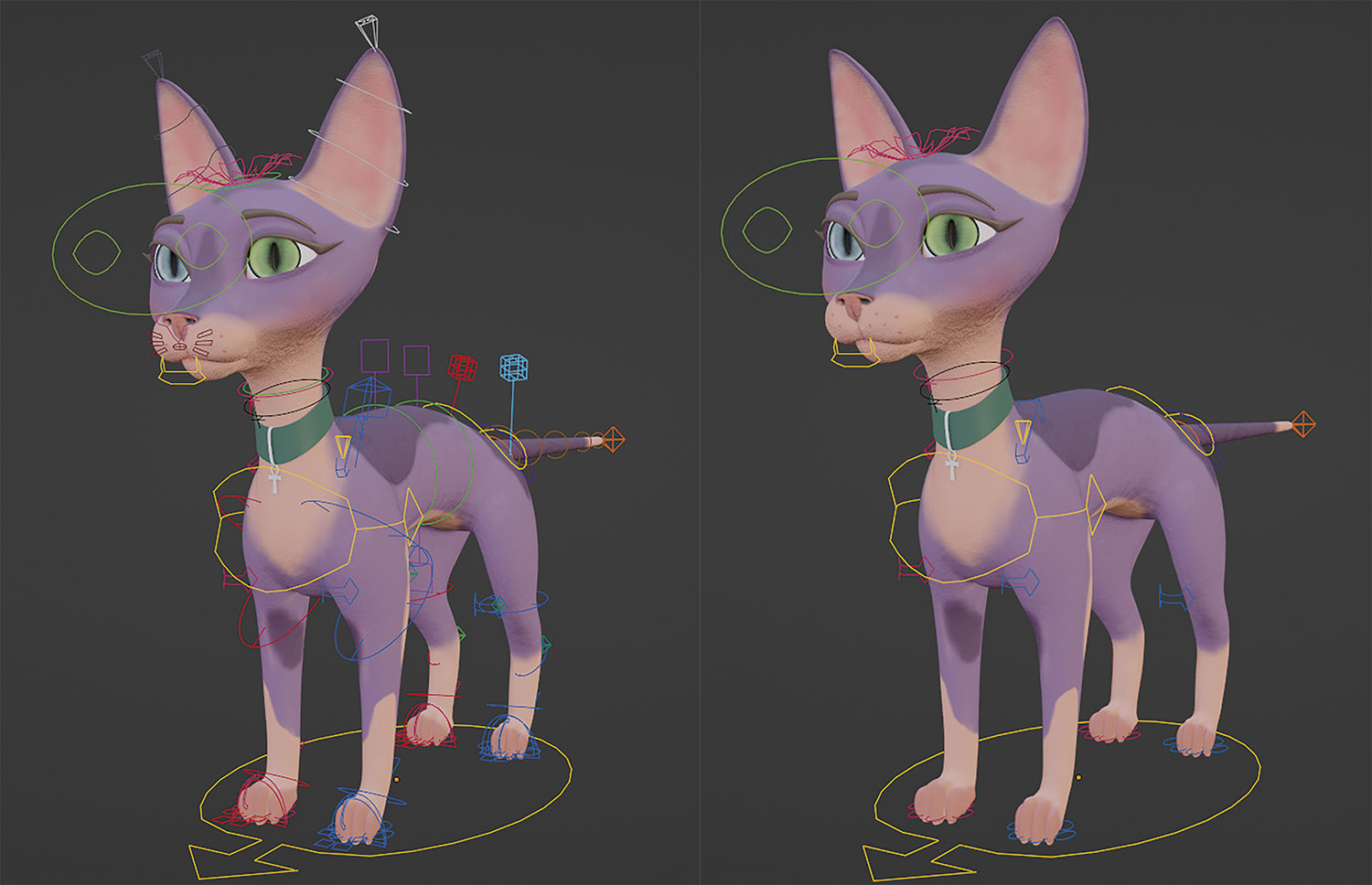
Para a terceira versão do rigging, foi utilizado o Rig UI (Rigging User Interface), dentro da função Layer Management do software Blender 3D. Essa função possibilita dividir as cadeias do riging em camadas, deixando ao animador a escolha de mostrar na cena apenas a parte do rigging que estiver animando, mantendo assim, a visualização do rigging mais limpa. Nas figuras 13 e 14 se observa isso.
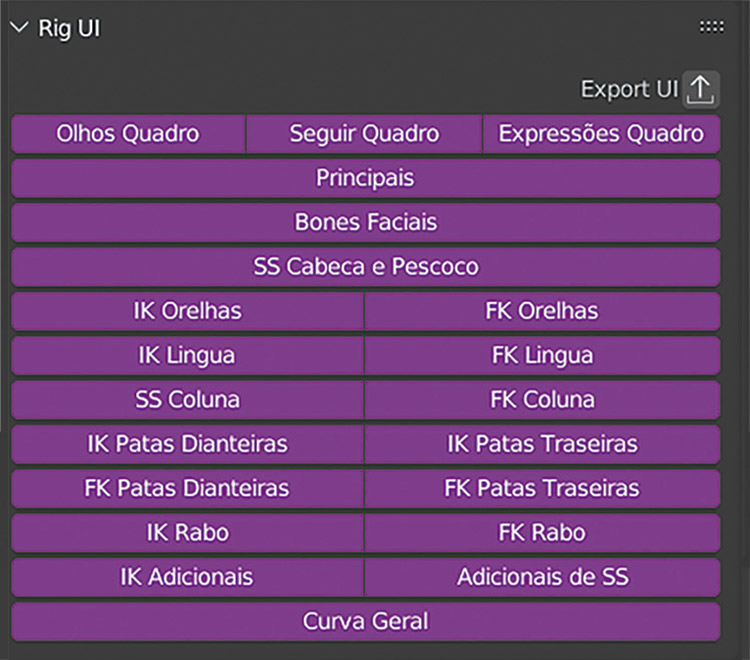
Na figura 15 são mostradas as interfaces do Rig UI para o personagens Cleo e Leo.

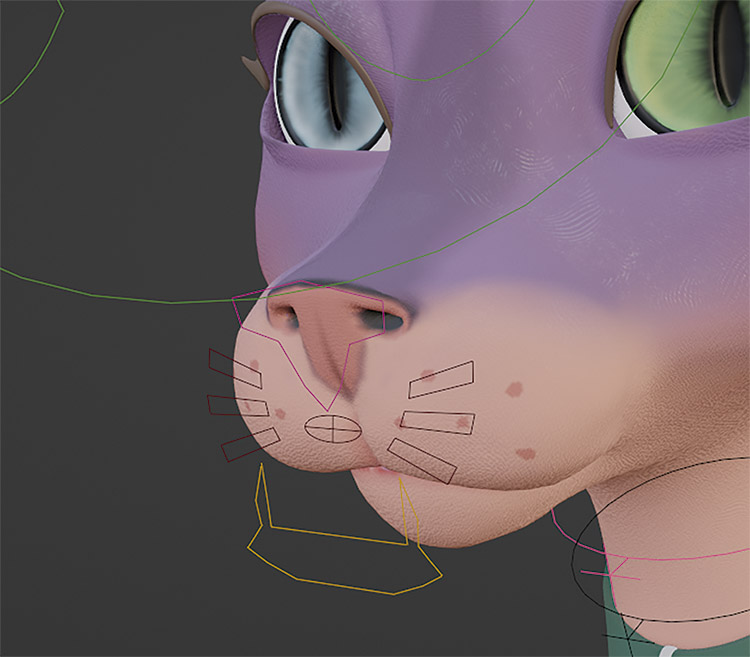
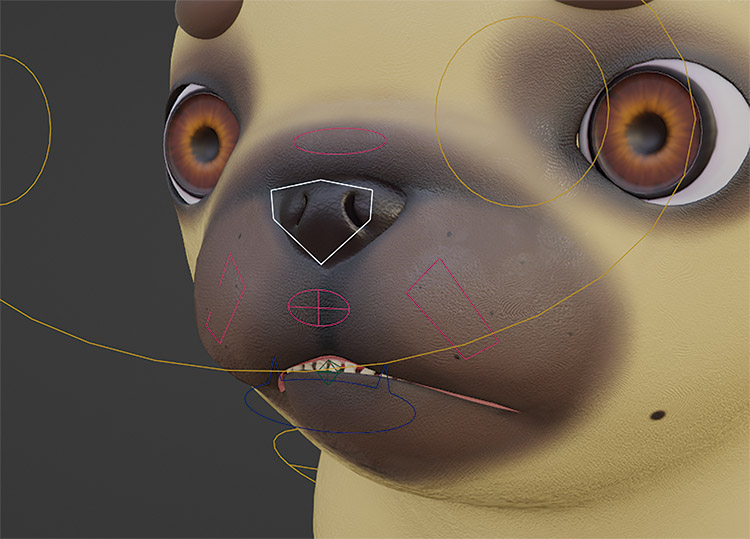
Para o rigging facial, existem dois tipos de controladores, um para alterar a malha de polígonos e o outro para determinar a estrutura de ossos da face. Para o Blender, a função que realiza este rigging é o Shape Key, que possibilita a criação de deformações, expressões e intenções do personagem. Na figura 16 são mostrados os riggings das faces dos dois personagens. O Shape Key possibilita a criação de deformações, expressões e intenções do personagem, e que, uma estrutura de ossos não ajuda efetivamente o animador a fazer o personagem aparentar que está respirando, produzir ganho de massa muscular ou sorrir efetivamente (Capell et al 2007).
Conclusão e perspectivas
Com essa pesquisa, foi demonstrada a importância de se realizar estudos aprofundados antes da produção de um rigging, seguindo todo o fluxo de trabalho para produzir três episódios de uma série de animação. O estudo da anatomia, da movimentação de quadrúpedes e da animação tradicional foi a base para a construção dos riggings. Com esse conteúdo, foi possível criar o riggings dos personagens Cleo e Leo, atendendo às necessidades de movimentação para uma animação no estilo cartoon para 3D.
Os três episódios de animação foram finalizados, permitindo testar a base teórica deste artigo. A equipe pretende testar o uso de dados de captura de movimento, para os movimentos dos dois quadrúpedes em um ambiente controlado. Novos episódios devem ser realizados, para dar continuidade à serie.
Nota final
1O primeiro episódio está disponível em https://youtu.be/krZ4Ek38wqY , o segundo em https://youtu.be/javwRuZK9nM e o terceiro em https://youtu.be/7BGfJ5iAEBQ .
Agradecimentos
Os autores gostariam de agradecer o apoio recebido da Fundação de Amparo à Pesquisa do Estado de Minas Gerais (FAPEMIG) e do Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq).
Bibliografia
Allen E.; Murdock, K.L. Body language: advanced 3D character rigging. Sibex. 2008.
Arshad, Mohd Rosli; Yoon, Kim Hae; Manaf, Ahmad Azaini Abdul; GHAZALI, Muhammad Azmin Mohamed. Physical rigging procedures based on character type and design in 3D animation. International Journal of Recent Technology and Engineering, vol. 8, no. 3, p. 4138– 4147, 2019. https://doi.org/10.35940/ijrte.C5484.098319. Accessed on: 25 Apr. 2023.
Blender, portal do software livre Blender está em https://www.blender.org/ , acessado em 25 de abril de 2023.
Bhatti, Asad; Bhatti, Zeeshan; Memon, Shahzad Ahmed; Waqas, Ahmad. A Purposed model for Quadruped footprint generation. 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies: Idea to Innovation for Building the Knowledge Economy, iCoMET 2020, p. 3–7, 2020. https://doi.org/10.1109/iCoMET48670.2020.9074144. Accessed on: 25 Apr. 2023.
Bhatti, Zeeshan; Shah, Asadullah; Shahidi, Farruh; Karbasi, Mostafa. Forward and Inverse Kinematics Seamless Matching Using Jacobian. 7 Jan. 2014. https://doi.org/10.48550/arXiv.1401.1488. Accessed on: 25 Apr. 2023.
BhatI, Zeeshan; Shah, Asadullah; Waqas, Ahmad; Mahmood, Nadeem. Analysis of design principles and requirements for procedural rigging of bipeds and quadrupeds characters with custom manipulators for animation. International Journal of Computer Graphics & Animation (IJCGA), vol.5, no. January, p. 87–94, 2015. Available at: https://doi.org/10.48550/arXiv.1502.06419 Accessed on: 25 Apr. 2023.
Bothell Pet Hospital. The Anatomy of Your Dog or Cat. 2021. Available at: https://bothellpethospital.com/the-anatomy-of-your-dog-or-cat/ . Accessed on: 25 Apr. 2023.
Capell, Steve; Burkhart, Matthew; Curless, Brian; Duchamp, Tom; Popović, Zoran. Physically based rigging for deformable characters. Graphical Models, vol. 69, no. 1, p. 71–87, 2007. https://doi.org/10.1016/j.gmod.2006.09.001. Accessed on: 25 Apr. 2023.
Coros, Stelian; Karpathy, Andrej; Jones, Ben; Reveret, Lionel; van de Panne, Michiel; Locomotion Skills for Simulated Quadrupeds. ACM Transactions on Graphics, vol. 30, no. 4, p. 1–12, Siggraph 2011.. Available at: http://doi.acm.org/10.1145/1964921.1964954. Accessed on: 25 Apr. 2023.
Geng, Weidong; Yu, Gino. Reuse of motion capture data in animation: A review. Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics, vol. 2669, p. 620–629, 2003. https://doi.org/10.1007/3-540-44842-X_63. Accessed on: 25 Apr. 2023.
Lasseter, John; Principles of traditional animation applied to 3D computer animation. Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1987, p. 35–44, 1 Aug. 1987. https://doi.org/10.1145/37401.37407 Accessed on: 25 Apr. 2023.
Liverman, Matt. The animator´s motion capture guide: organizing, managing and editing. Charles River Media, 2004.
Muybridge, Eadweard, Muybridge’s Complete human and animal locomotion : all 781 plates from the 1887 Animal locomotion. Biblioteca do Congresso dos Estados Unidos a partir do livro da Dover de 1979, disponível em https://www.loc.gov/item/79051299/ , acessado em 25 Apr. 2023.
Marconi, Maria de Andrade; Lakatos, Eva Maria. Fundamentos de Metodologia Científica. 9 ed. Editora Atlas, 2003.
SKRBA, L; REVERET, L; HÉTROY, F; … MP Cani - Quadruped animation. hal.inria.fr, p. 7–23, Eurographics’ 2008. Available at: https://hal.inria.fr/inria-00331715/. Accessed on: 25 Apr. 2023.
Sung, Mankyu; Fast motion synthesis of quadrupedal animals using a minimum amount of motion capture data. Ettri Journal Wiley Online Library, vol. 35, no. 6, p. 1029–1037, Dec. 2013. DOI 10.4218/etrij.13.2013.0059. Available at: https://onlinelibrary.wiley.com/doi/abs/10.4218/etrij.13.2013.0059. Accessed on: 25 Apr. 2023.
Tannure, Marcelo; Corrêa, Gustavo Rodrigues; Gomide, João Victor Boechat. Comparação de estratégias de render em um curta-metragem de animação. AVANCA | CINEMA, v. 13, p. 824-832, 2022.
Thomas, F.; Johnston, O. The Illusion of Life. Disney Editions, 1995.
Thornton, J.E. Computer animation of quadrupedal locomotion. Dissertação de mestrado apresentada para a Texas A&M University. 2005. Available at: https://oaktrust.library.tamu.edu/handle/1969.1/1400. Accessed on: 25 Apr. 2023.
Williams, Richard E. The Animator’s Survival Kit: A Working Manual of Methods, Principles and Formulas for Computer, Stop-motion, Games and Classical Animators. Faber&Faber, 2012.